简介:ABB机器人数据存储类型区别 CONST VAR PERS 区别 1)ABB机器人任何数据都有存储类型,分为常量CONST,变量VAR和可变量 2)常量CONST,即程序内不能赋值 3)变量和可变量程序都能赋值,区别如下 变量-有初值和当前值。在执行打开程序,移动指针到main,移动指……
CONST VAR PERS 区别
1)ABB机器人任何数据都有存储类型,分为常量CONST,变量VAR和可变量
2)常量CONST,即程序内不能赋值
3)变量和可变量程序都能赋值,区别如下
变量-有初值和当前值。在执行打开程序,移动指针到main,移动指针到routine时,变量的当前值会被初始化,即值变为初值
可变量,只有当前值。即任何时候做了修改,其值就修改了。在执行打开程序,移动指针到main,移动指针到routine时,值就是当前值,不会发生变化
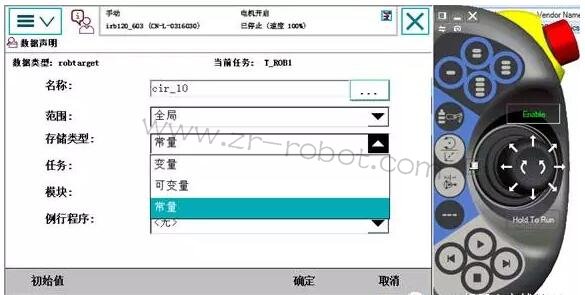
4)默认插入的robtarget的存储类型是const,即常量,此时无法赋值(如下图,即使类型选到robtarget还是不显示已经建立的robtarget)
此时,到程序数据,找到这个数据,编辑-更改申明,修改为变量赋值语句时,就能找到这个点位了。
创建带参数例行程序
1)什么是参数例行程序?

例行程序可以输入参数,使用的时候看起来就像自定义指令
2)有什么用?
方便使用,用户不用关心内部实现过程
3)如何创建
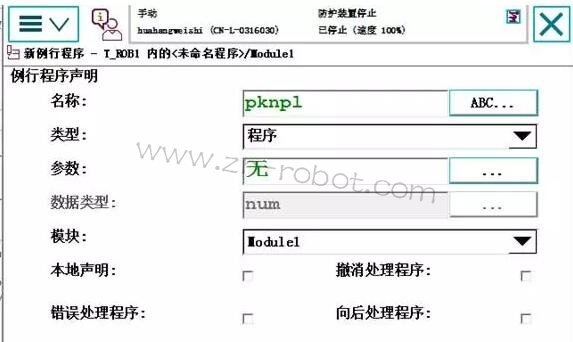
1)新建例行程序
2)设置名称,点击参数,设置输入参数
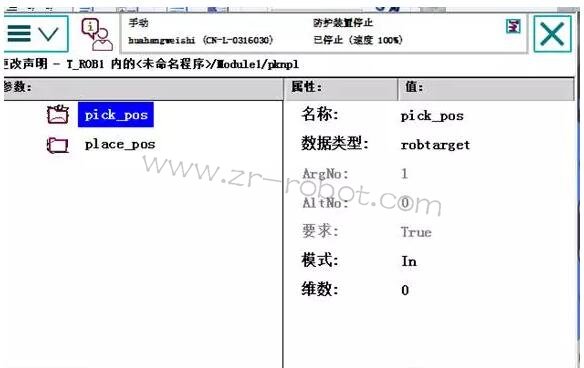
3)添加参数,注意右边的数据类型即为该参数数据类型,此处举例输入为2个
4)点击确定。
5)程序内部根据自己需要添加内容
6)带参数例行程序不能直接使用,必须有人调用,且输入参数,如下
例pknpl指令的创建,实现功能为从pHome位置吸取并到Target_10位置放置
PROCRoutine2()
pknpl pHome,Target_10;
ENDPROC
PROCpknpl(robtarget pick_pos,robtarget place_pos)
MoveJoffs(pick_pos,0,0,30),v500,z1,tool0;
MoveL pick_pos,v500,fine,tool0;
Set do1;
MoveLoffs(pick_pos,0,0,30),v500,z1,tool0;
MoveJoffs(place_pos,0,0,30),v500,z1,tool0;
MoveL place_pos,v500,fine,tool0;
ReSet do1;
MoveL offs(place_pos,0,0,30),v500,z1,tool0;
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > ABB机器人维修 > ABB机器人保养 >
首页 > ABB机器人维修 > ABB机器人保养 > 

