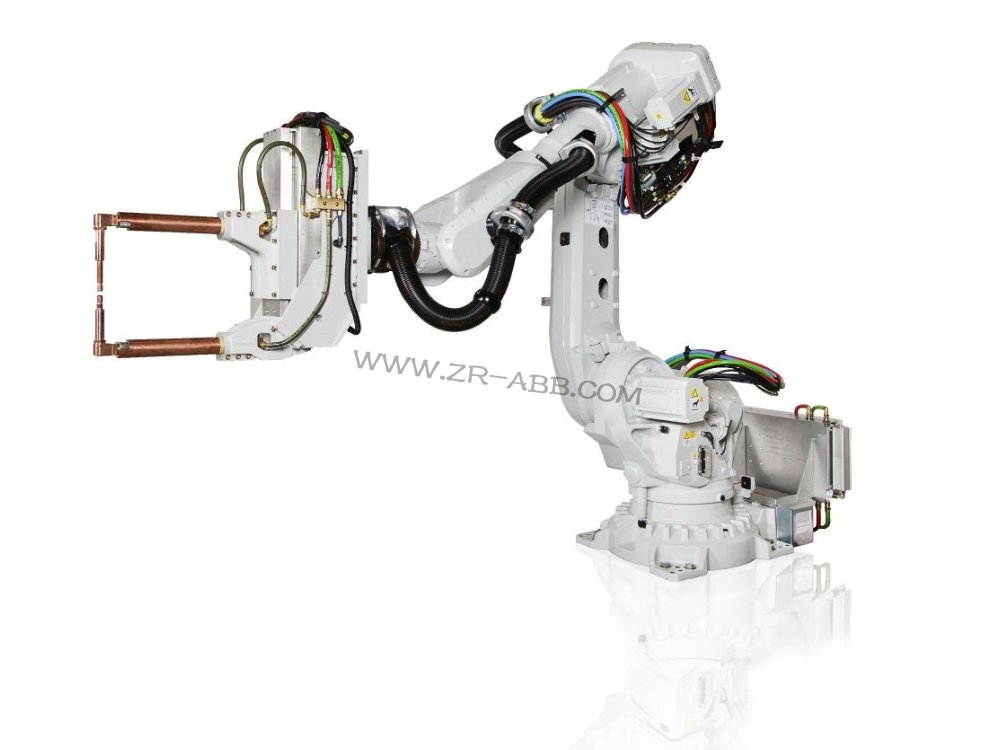
简介:ABB机械手IRB6700主打重载物料搬运与精密装配,多轴协同运动能适配复杂作业场景,长期承受工件重量与高频动作,易出现轴系润滑衰减、外观积尘或末端执行器磨损,日常保养需贴合其重载特性,兼顾机械灵活性与作业精度,避免小隐患累积影响设备运行。……
ABB机械手IRB6700主打重载物料搬运与精密装配,多轴协同运动能适配复杂作业场景,长期承受工件重量与高频动作,易出现轴系润滑衰减、外观积尘或末端执行器磨损,日常保养需贴合其重载特性,兼顾机械灵活性与作业精度,避免小隐患累积影响设备运行。
ABB机器人保养的日常操作无需复杂拆解,却能有效延缓部件老化,保障设备持续稳定作业。
外观与基础清洁需每日落实。作业结束后,用干燥无尘布擦拭机械手手臂表面、法兰连接面及底座,重点清理手腕轴旋转间隙与线缆接头处的粉尘、碎屑,这些部位积尘易导致运动卡顿或信号接触不良。若机械手用于多油污场景,可蘸取少量中性清洁剂擦拭油污区域,擦拭后用干布吸干水分,避免清洁剂渗入密封件引发腐蚀。检查手臂外壳有无划痕或变形,轻微划痕可涂抹专用保护剂,变形处需标记并在定期深度保养时进一步检查,防止外壳破损影响内部元件防护。
关键轴系润滑养护是日常
ABB机器人保养的核心。按技术手册标注的各轴润滑点,每日作业前用专用注脂枪补充少量润滑脂,注油量以油位观察窗中线为准,过多油脂易因轴系高速转动溢出,污染工件或影响传感器检测。手动转动各关节至极限位置,感受运行阻力是否均匀,若存在轻微卡顿,需补充润滑脂并反复活动关节,确保油脂充分渗透至轴承与齿轮啮合面。针对长期承受重载的大臂、小臂连接轴,需适当增加润滑频率,避免润滑不足导致金属磨损加快。轴系润滑的日常落实能直接延长关节使用寿命。
末端执行器维护需适配作业需求。若IRB6700搭载夹持式执行器,每日需检查夹爪磨损情况,爪指内侧防滑纹磨平时需及时更换,或粘贴防滑垫片增强抓取稳定性;若为吸盘式执行器,需清理吸盘内侧异物,检查吸盘密封性,密封不良时更换老化吸盘,防止工件抓取时脱落。清洁执行器与法兰的连接螺栓,用扭矩扳手按标准力矩复紧,螺栓松动易导致执行器偏移,影响工件定位精度。每次更换执行器后,需通过示教器校准执行器中心点,确保与机械手运动轨迹匹配,避免负载重心偏移引发轴系受力不均。
功能精度校验需定期开展。每日作业前,通过示教器执行原点回归操作,对比 3 次回归数据,偏差超限时需微调编码器参数,确保各轴初始位置准确;启动空载全行程运动,观察各轴运动是否顺畅、有无异响,异响部位需重点检查润滑状态或部件连接情况。测试机械手重复定位精度,让设备抓取标准工件并放置至指定点位,连续操作 10 次,记录每次放置偏差,偏差过大时需检查轴系间隙或末端执行器校准状态。ABB机器人保养的精度校验环节,能及时发现参数漂移,避免影响作业质量。
环境适配调整需融入日常操作。若机械手安装在室外或半开放区域,每日需检查手臂表面有无雨水残留,雨后及时用干布擦拭,防止水分渗入轴系引发锈蚀;用于高温环境时,需每日清理电机散热孔粉尘,避免电机过热导致运动效率下降。闲置超过 8 小时的机械手,重启前需执行低速空载运行,让各轴缓慢活动 5 分钟,待润滑脂均匀分布后再加载作业,避免突然启动导致部件冲击损伤。
日常保养记录需细致归档。每次保养后,记录清洁部位、润滑点注油量、执行器状态及精度测试数据,建立每日保养台账,便于后续追踪部件老化趋势。若发现某一轴系润滑脂消耗过快,可在后续日常保养中适当增加注脂量;若末端执行器频繁磨损,需分析是否与工件材质或抓取力度相关,针对性调整作业参数。ABB 机械手 IRB6700 的日常保养需形成固定流程,通过持续规范的操作,让设备始终保持良好运行状态,适配重载作业的长期需求。
文章来源,
工业机器人维修官网:www.zr-abb.com


 首页 > ABB机器人维修 > ABB机器人保养 >
首页 > ABB机器人维修 > ABB机器人保养 >