ΦρΫιΘΚABBΜζΤς»Υ ΨΫΧΤςΈ§–όΘ§ABB ΨΫΧΚ–Έ§–όΘ§ΜζΤς»ΥΈ§–όΒ»Θ§Ω…“‘Ή…―·Ιψ÷ίΉ”»ώΜζΤς»ΥΦΦ θ”–œόΙΪΥΨΘ§±ΨΙΪΥΨ «“ΜΦ“ΒΎ»ΐΖΫΙΛ“ΒΜζΤς»ΥΈ§–όΖΰΈώ…ΧΘ§ ΖΰΈώΒγΜΑΘΚ400-878-2528ΘΜ ÷ΜζΘΚ15889988091ΓΘ 1.»œ ΕABB–ιΡβ ΨΫΧΤς »γΆΦ3.1Υυ Ψ‘ΎάκœΏΉ”≤ΥΒΞœ¬”–“ΜΗω–ιΡβ ΨΫΧΤς,ΒψΜςΥϋΓ≠Γ≠
ΓΓΓΓ
ΓΓΓΓ1.»œ ΕABB–ιΡβ ΨΫΧΤς
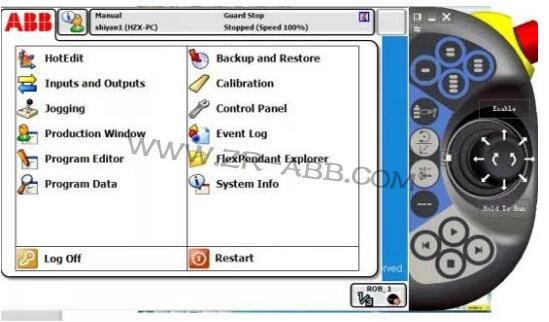
ΓΓΓΓ2.‘Ύ–ιΡβ ΨΫΧΤς…œΫ®ΝΔ–¬≥Χ–ρœνΡΩ
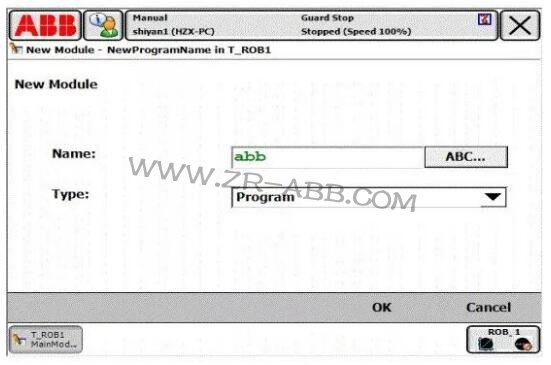
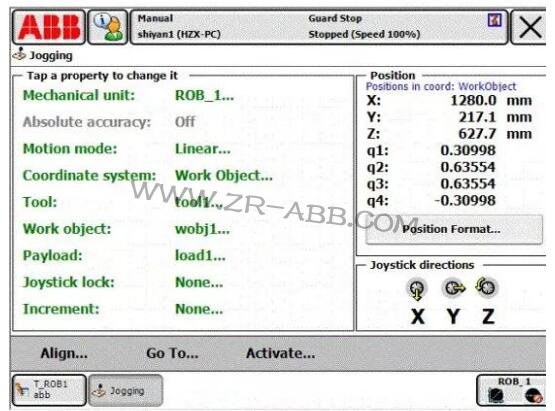
ΓΓΓΓ‘ΎΆΦ3.3÷–ΒψΜςΫχ»κ“ Program Editor”ΫγΟφ,»γΆΦ3.4Υυ ΨΫχ»κΫγΟφΚσ–¬Ϋ®“ΜΗω»ΓΟϊΈΣ“abb”ΒΡ–¬≥Χ–ρΓΘ»ΜΚσΜΊΒΫ–ιΡβΫΧΤς÷ςΫγΟφ,ΒψΜςΫχ»κ“Jogging”ΫγΟφ,‘Ύ“ Jogging”ΫγΟφΫΪ“ Motion mode”ΚΆ“ Coordinatesystem”Ζ÷±π―Γ‘ώΈΣ“ Linear”ΚΆ“ Work Object”άύ–Ά,≤Δ–¬Ϋ®“Tool” “ Work object”ΓΔ“ Pay load”»ΐΗωœνΡΩΓΘ»γΆΦ3.5aΓΔΆΦ3.5cΓΔΆΦ3.5dΥυ ΨΓΘΤδ÷– Tool1ΒΡ“ Initial Value”άύ–Ά÷–“x.y.z” ΐ÷ΒΕΦΗΡΈΣ80,“mass”ΒΡ ΐ÷ΒΗΡΈΣ1,»γΆΦ3.5bΥυ Ψ

ΓΓΓΓΫ®ΝΔΚΟΒΡ JoggingΫγΟφ»γΆΦ3.6Υυ Ψ
ΓΓΓΓ3.≥Χ–ρΒΡ±ύ–¥
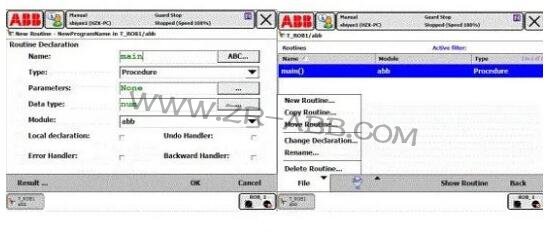
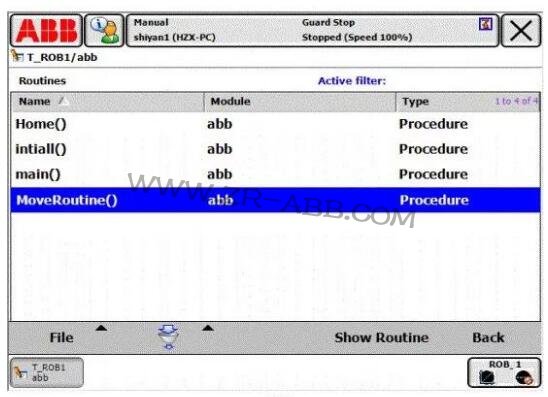
ΓΓΓΓΜΊΒΫ–ιΡβΫΧΤς÷ςΫγΟφ,Ϋχ»κ“ Program Editor”ΫγΟφ,»γΆΦ3.7Υυ Ψ,‘Ύ“ab”≥Χ–ρΡΎΫ®ΝΔ“main”Κ· ΐΚΆΦΗΗωΉ”Κ· ΐΓΘΫ®ΝΔΚΟΒΡΚ· ΐΦϊΆΦ3.8Υυ ΨΓΘΤδ÷–“main()” «÷ςΚ· ΐ,“ Intial()” «≥θ ΦΜ·Κ· ΐΓΘ“ MoveRoutine()” «ΜζΤς»Υ‘ΥΕ·÷ΗΝνΚ· ΐ,“Home()” «ΜζΤς»ΥΜΊ‘≠ΒψΚ· ΐΓΘ
ΓΓΓΓ“ Intial()”≥θ ΦΜ·Κ· ΐ
ΓΓΓΓ»γœ¬ΆΦ3.9Υυ ΨΈΣ≥θ ΦΜ·Κ· ΐ≥Χ–ρ,ΆΦ÷– AccSetΚΆ VelvetΕΦ «‘ΥΕ·ΩΊ÷Τ÷ΗΝνΓΘ AccSet100,100; «Φ”ΥΌΕ»…ηΕ®÷ΗΝνVerset100,50000; «ΥΌΕ»…ηΕ®÷ΗΝν

ΓΓΓΓ“ Move routine()”ΜζΤς»Υ‘ΥΕ·÷ΗΝνΚ· ΐ
ΓΓΓΓ»γœ¬ΆΦ3.10aΥυ Ψ
ΓΓΓΓMoveJ p10,v200,z1, toolllwobj:wobj1;±μ ΨΜζΤς»ΥΫΪ–·¥χΙΛΨΏtool―ΊΉ≈“ΜΗωΖ«œΏ–‘¬ΖΨΕΒΫΨχΕ‘÷αΈΜ÷Οp10,“‘ΥΌΕ» ΐΨίv200ΚΆzone ΐΨίz1ΓΘ
ΓΓΓΓMovep20,v200,z1, toolllwobj: obj 1;±μ ΨΜζΤς»ΥΫΪ–·¥χΙΛΨΏtool―ΊΉ≈“Μ÷±œΏ¬ΖΨΕ”…ΨχΕ‘÷αΈΜ÷Ο p10 ΒΫΨχΕ‘÷αΈΜ÷Ο p20,“‘ΥΌΕ» ΐΨίv200ΚΆzone ΐMovel p30,v200,fine, toollwobj:wobj1;±μ ΨΜζΤς»ΥΫΪ–·¥χΙΛΨΏtool―ΊΉ≈÷±œΏ¬ΖΨΕ”…ΨχΕ‘÷αΈΜ÷Οp20ΒΫΨχΕ‘÷αΈΜ÷Οp30,“‘ΥΌΕ» ΐΨίv200ΚΆzone ΐΨίfineΓΘ
ΓΓΓΓΤδ÷–ΨχΕ‘÷αΈΜ÷Οpl0ΓΔp20ΓΔp30“ΣΉ‘ΦΚΫ®ΝΔ»γΆΦ3.10bΥυ Ψ,≤Δ”Ο ÷Ε·“ΤΕ·ΜζΤς»ΥΒΫœύ”ΠΒΡ≤ΜΆ§ΈΜ÷Ο,»ΜΚσΖ÷±π…ηΕ®ΚΟΨχΕ‘÷αΈΜ÷ΟΓΘ

ΓΓΓΓ“ Homeo”ΜζΤς»ΥΜΊ‘≠ΒψΚ· ΐ
ΓΓΓΓ»γΆΦ3.11aΥυ ΨΓΘ
ΓΓΓΓMoveJ pHome,vl50,fine, toolllwobj: wobjl;±μ ΨΜζΤς»ΥΫΪ–·¥χΙΛΨΏ tool―ΊΉ≈“ΜΗωΖ«œΏ–‘¬ΖΨΕΜΊΒΫ‘≠ΒψΈΜ÷Ο pHome,“‘ΥΌΕ» ΐΨίv150ΚΆzone ΐΨίfine
ΓΓΓΓΤδ÷–‘≠ΒψΈΜ÷Ο pHome“≤“ΣΉ‘ΦΚΫ®ΝΔ»γΆΦ311bΥυ Ψ,≤Δ”Ο ÷Ε·“ΤΕ·ΜζΤς»ΥΒΫΡ≥Ηω±Μ»œΈΣΒΡ‘≠ΒψΈΜ÷Ο,»ΜΚσ…ηΕ®‘≠ΒψΈΜ÷ΟΓΘ

ΓΓΓΓ“ maino”÷ςΚ· ΐ
ΓΓΓΓ»γΆΦ3.12aΥυ ΨΓΘ
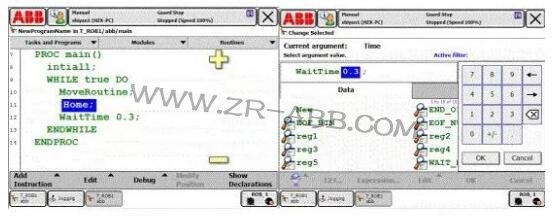
ΓΓΓΓ‘Ύ÷ςΚ· ΐ÷–,œ»Βς»κ≥θ ΦΜ·Κ· ΐ,»ΜΚσΦ”“ΜΗω while―≠ΜΖΚ· ΐ,ΫΪ Θœ¬ΒΡΝΫΗωΉ”Κ· ΐ“ MoveRoutine()”ΚΆ“Home()”Ζ÷±πΒς»κ while―≠ΜΖ÷–,Ά§ ±‘Ύ while―≠ΜΖΚ· ΐ÷–Φ”“ΜΗω“ WaitTime0.3;” ±ΦδΒ»¥ΐ÷ΗΝνΓΘ»γ¥Υ÷ςΚ· ΐΨΆ–¥ΚΟΝΥΓΘ
ΓΓΓΓ4.‘Υ––≥Χ–ρΒς ‘ΜζΤς»Υ
ΓΓΓΓ»γœ¬ΆΦ3.13aΥυ Ψ,ΫΪ ΨΫΧΤςΩΣΗω¥ρΒΫΆΦ÷–Υυ Ψ÷–ΦδΒΡ“ ÷Ε·ΒΒΈΜ”,‘ΌΒψΜς“ Enable”, ΙΥϋ»γΆΦ3.13bΥυ Ψ±δάΕ,¥Υ ±±μ ΨΜζΤς»Υ“―Ψ≠…œΒγ,ΉνΚσΑ¥œ¬≥Χ–ρ‘Υ––Α¥≈ΞΦ¥Ω…ΤτΕ· ΨΫΧΤς÷–Υυ±ύ–¥ΒΡ≥Χ–ρΓΘ≥Χ–ρΩΣ Φ‘Υ––ΒΡΆ§ ±ΜζΤς»Υ“≤ΫΪΜαΑ≤Α¥’’≥Χ–ρ÷–…ηΕ®ΒΡ¬ΖœΏ‘ΥΕ·ΓΘ

ΈΡ’¬ά¥‘¥Θ§
ΙΛ“ΒΜζΤς»ΥΈ§–όΙΌΆχΘΚwww.zr-abb.com

 ΜζΤς»ΥΉ ―Ε
ΜζΤς»ΥΉ ―Ε 80%Τσ“ΒΟφΝΌΒΙ±’Θ§ΙΛ“ΒΜζΤς»Υ≤ζΡή―œ÷ΊΙΐ Θ
80%Τσ“ΒΟφΝΌΒΙ±’Θ§ΙΛ“ΒΜζΤς»Υ≤ζΡή―œ÷ΊΙΐ Θ
 Ή“≥ > ABB ΨΫΧΤςΈ§–ό >
Ή“≥ > ABB ΨΫΧΤςΈ§–ό >